Using DJI Mini with UgCS
It is possible to use smaller DJI drones (that don't natively support waypoint functionality) with UgCS. This can be achieved by using UgCS together with Litchi.
Supported drones:
DJI Mini 4 Pro, Mini 3 Pro, Mini 2, Air 2S, DJI Mini SE, Mavic Mini, Mavic Air 2, Mavic Air / Pro (1st gen), Spark.
Note that a remote controller with support for third-party apps is required. For example, for DJI Mini 4 Pro can only be used with DJI RC-N2 (no built-in screen) but not with the DJI RC 2 (with a built-in screen).
Follow the steps below to use your small DJI drone on missions planned in UgCS.
-
Download and install Litchi mobile app
Before starting the Litchi mobile app has to be installed on the mobile device or supported DJI remote controller that you will be using.
There are two different apps available based on what drone is used. For Mini 3, Mini 3 Pro and Mini 4 Pro the newer Litchi Pilot app should be used. For older drones the Litchi for DJI Drones app should be used.
Visit https://flylitchi.com/help for more detailed instructions. -
OpenLitchi Mission Hub
(Optional) Plan a basic mission with a few waypoints in Litchi Mission Hub, save it and ensure it syncs up with the Litchi app on the mobile device. The sync should happen automatically. -
Import your drone profile in UgCS.
Download the profile of your drone from this page.
In UgCS go to Main Menu / Profiles / Vehicles.
Select Import, choose your drone .profile file and confirm.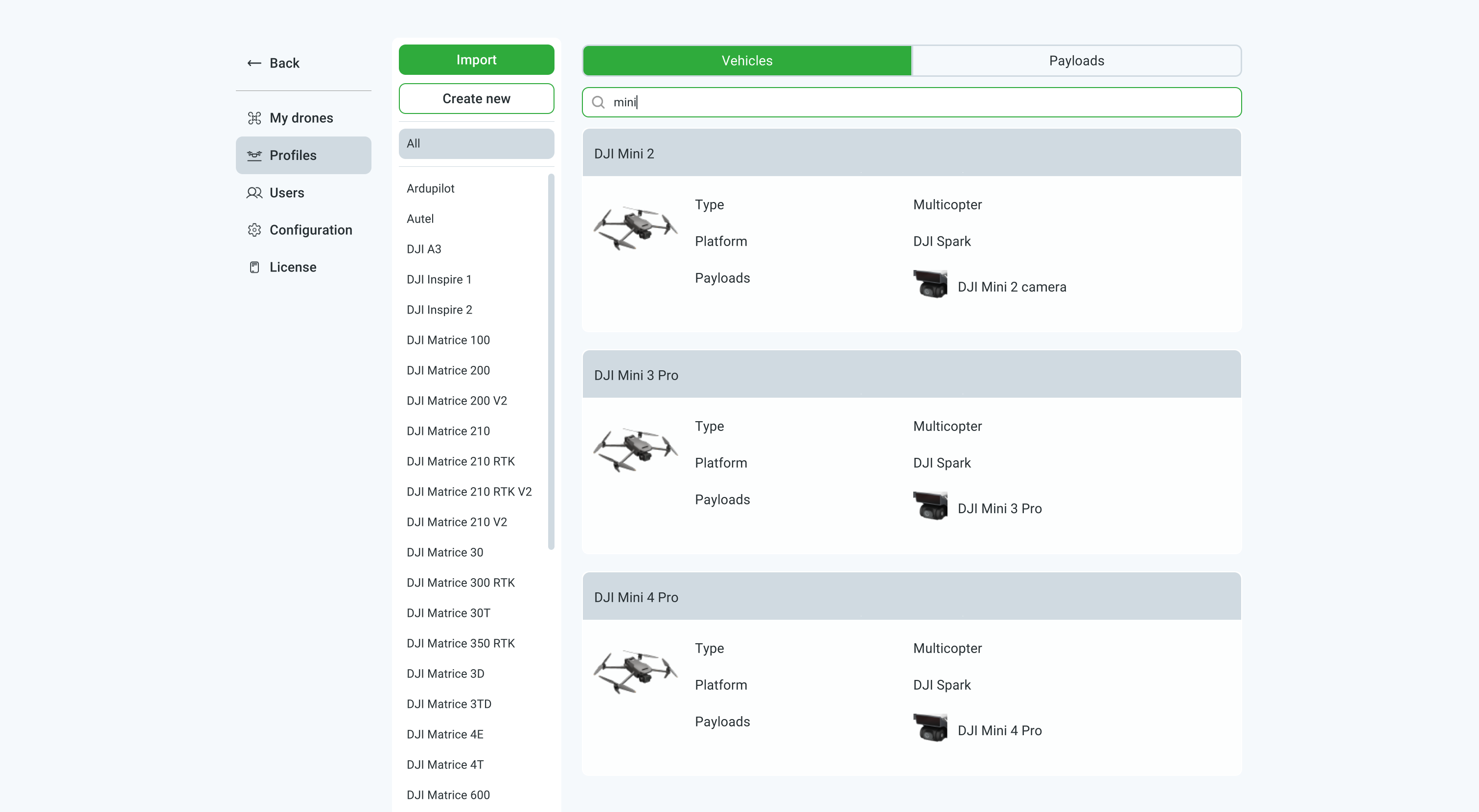
-
Plan a route in UgCS for your drone.
Currently supported flight plans: Photogrammetry, Corridor Mapping, Waypoint, Area Scan.
Note the photo capture time/distance interval. This setting can be accessed in the route log by clicking on the green checkbox on the route card in UgCS.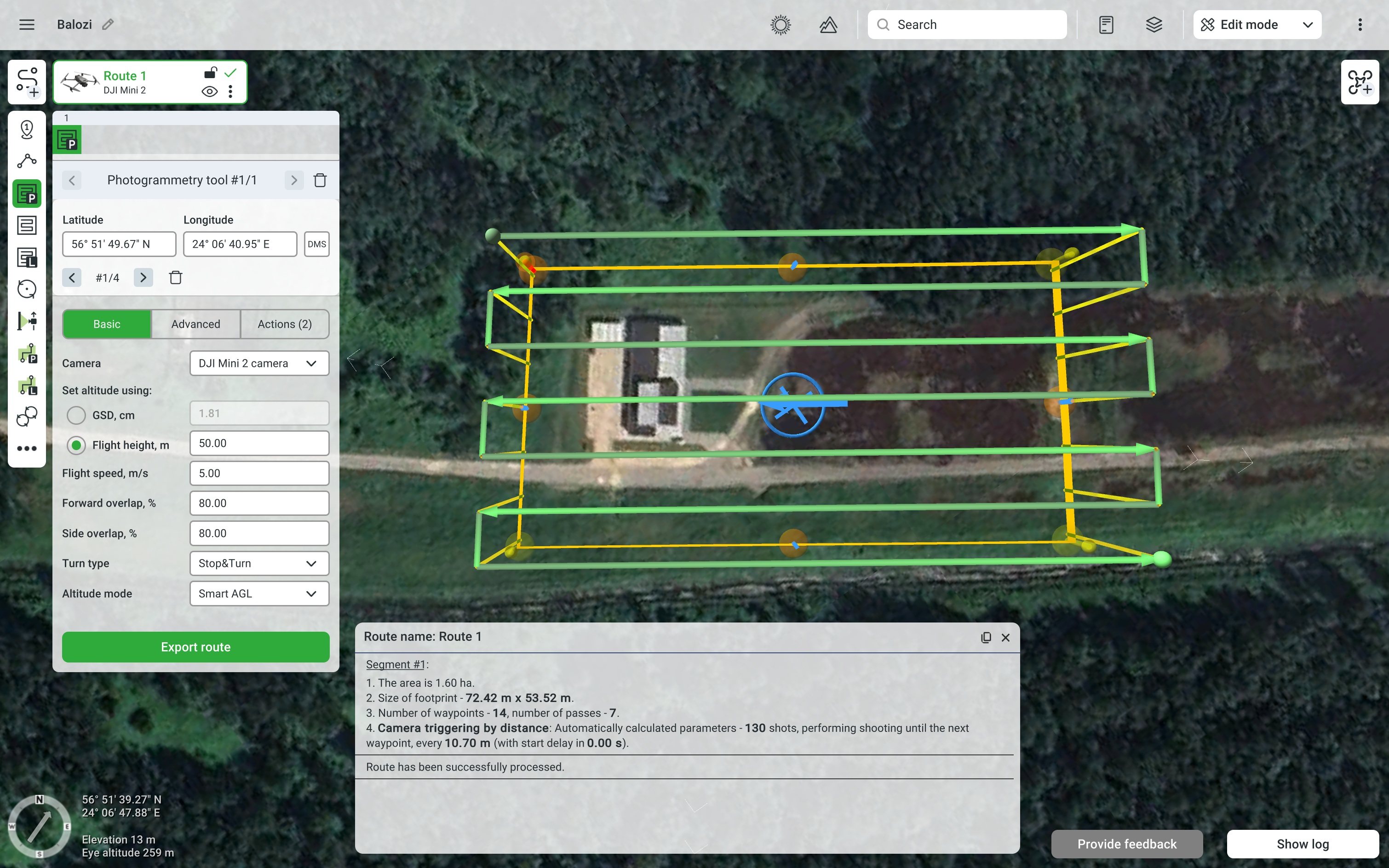
-
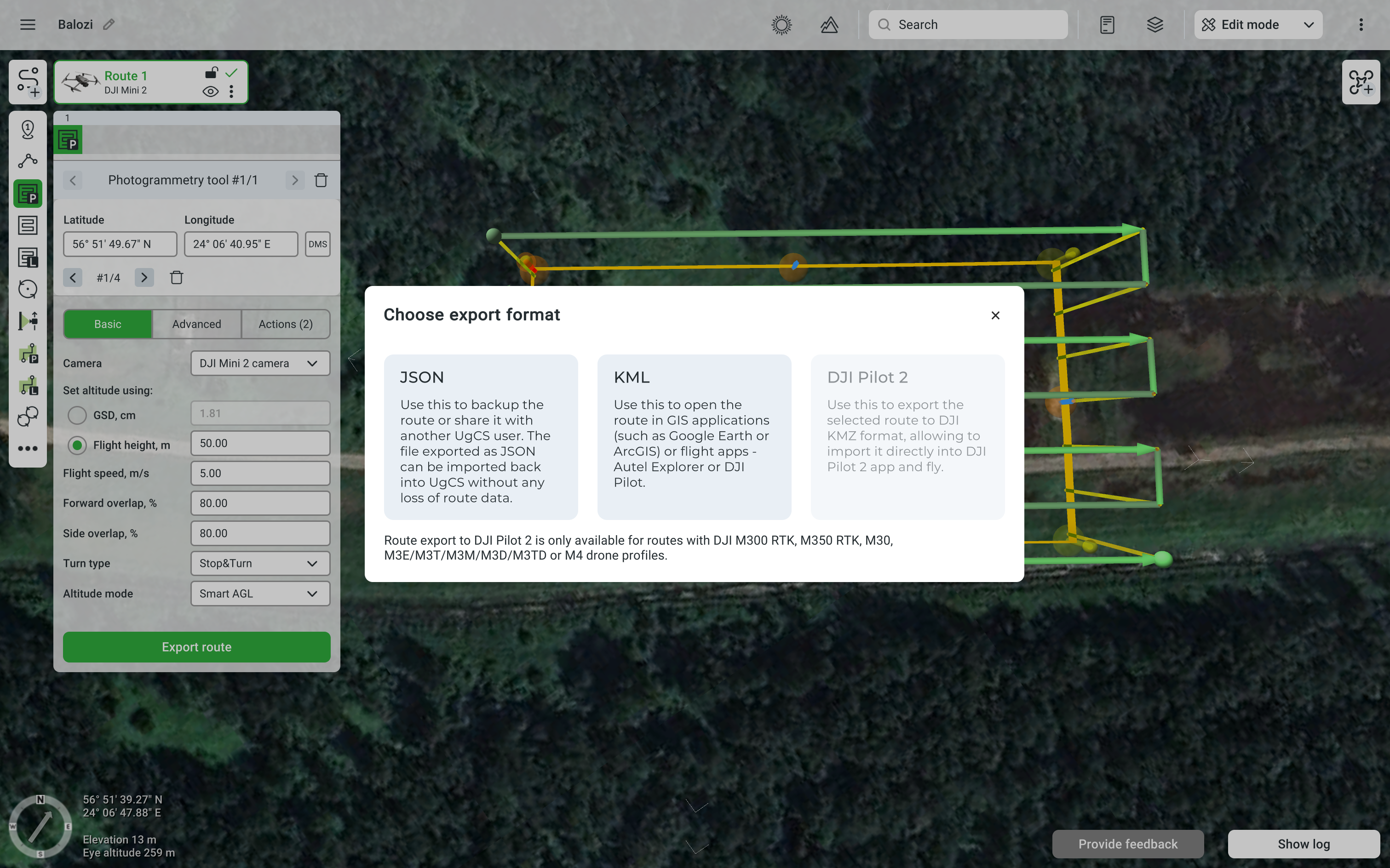
Export the route as KML.
Click on the route context menu and select Export.
As the Export format select KML.
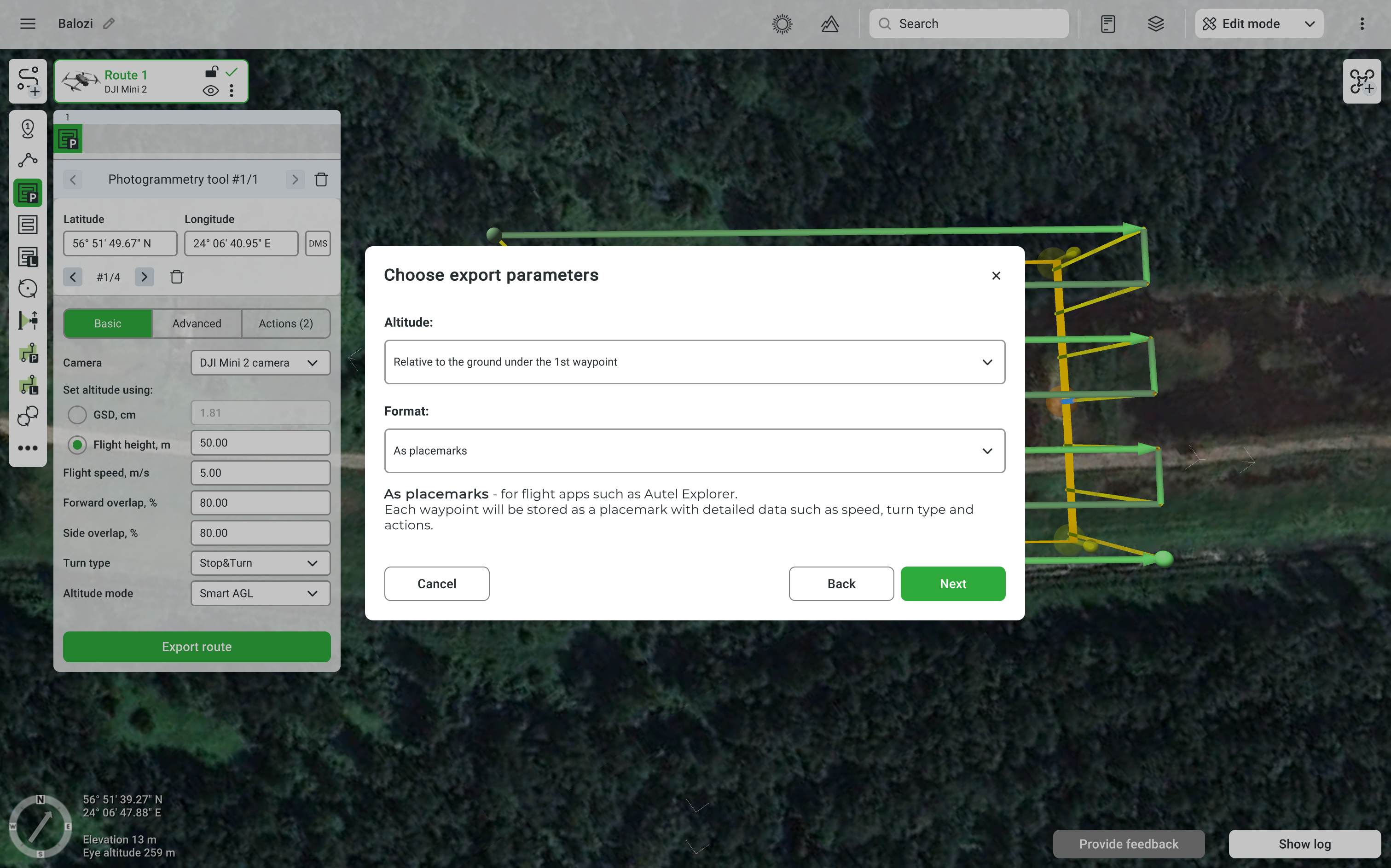
In the export window select Altitude: Relative to ground under the 1st waypoint and Format: As placemarks.
-
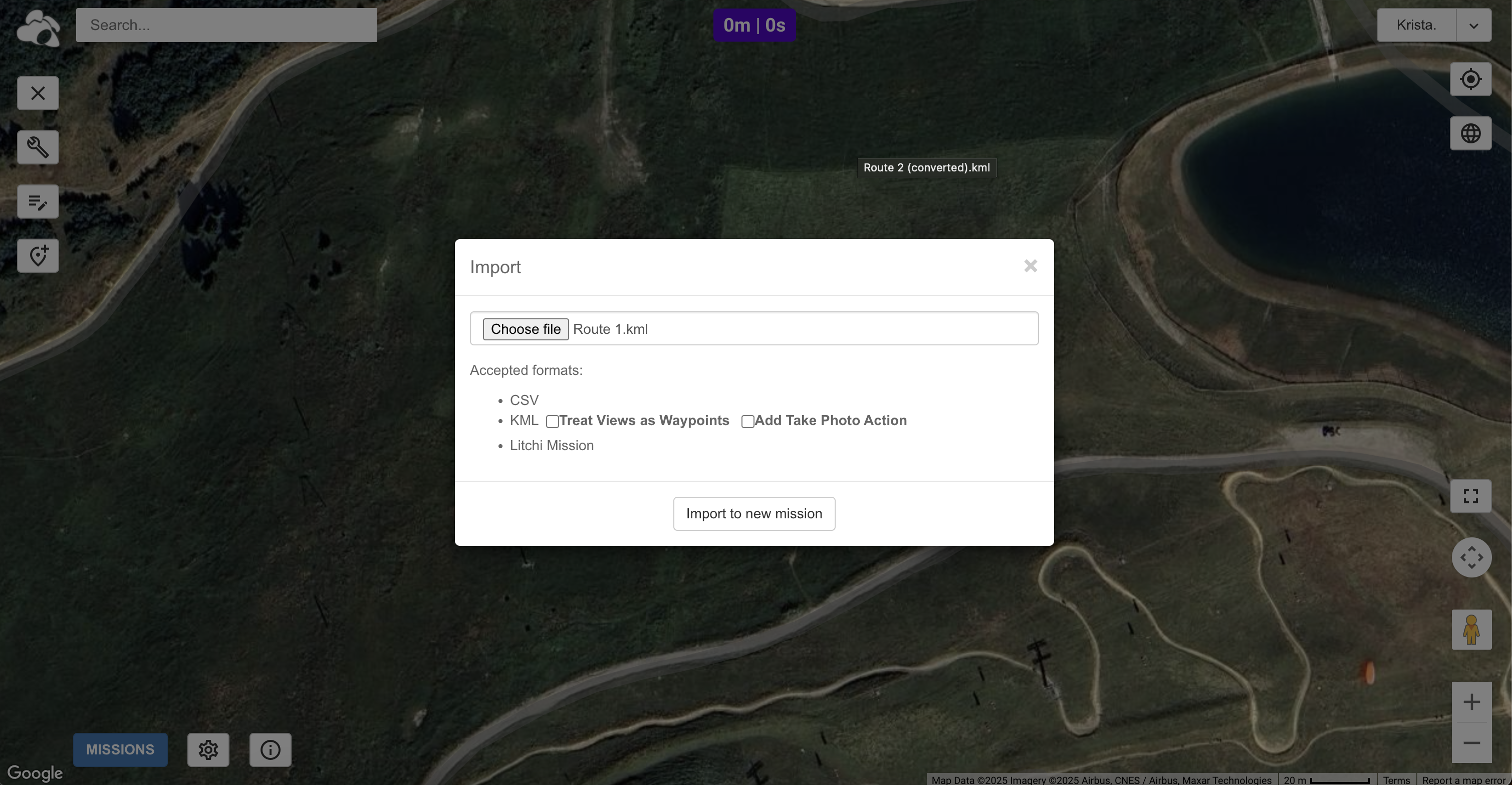
Import the UgCS KML file into Litchi Mission Hub.
Click on Missions / Import, select the KML file and import it to a new mission.
-
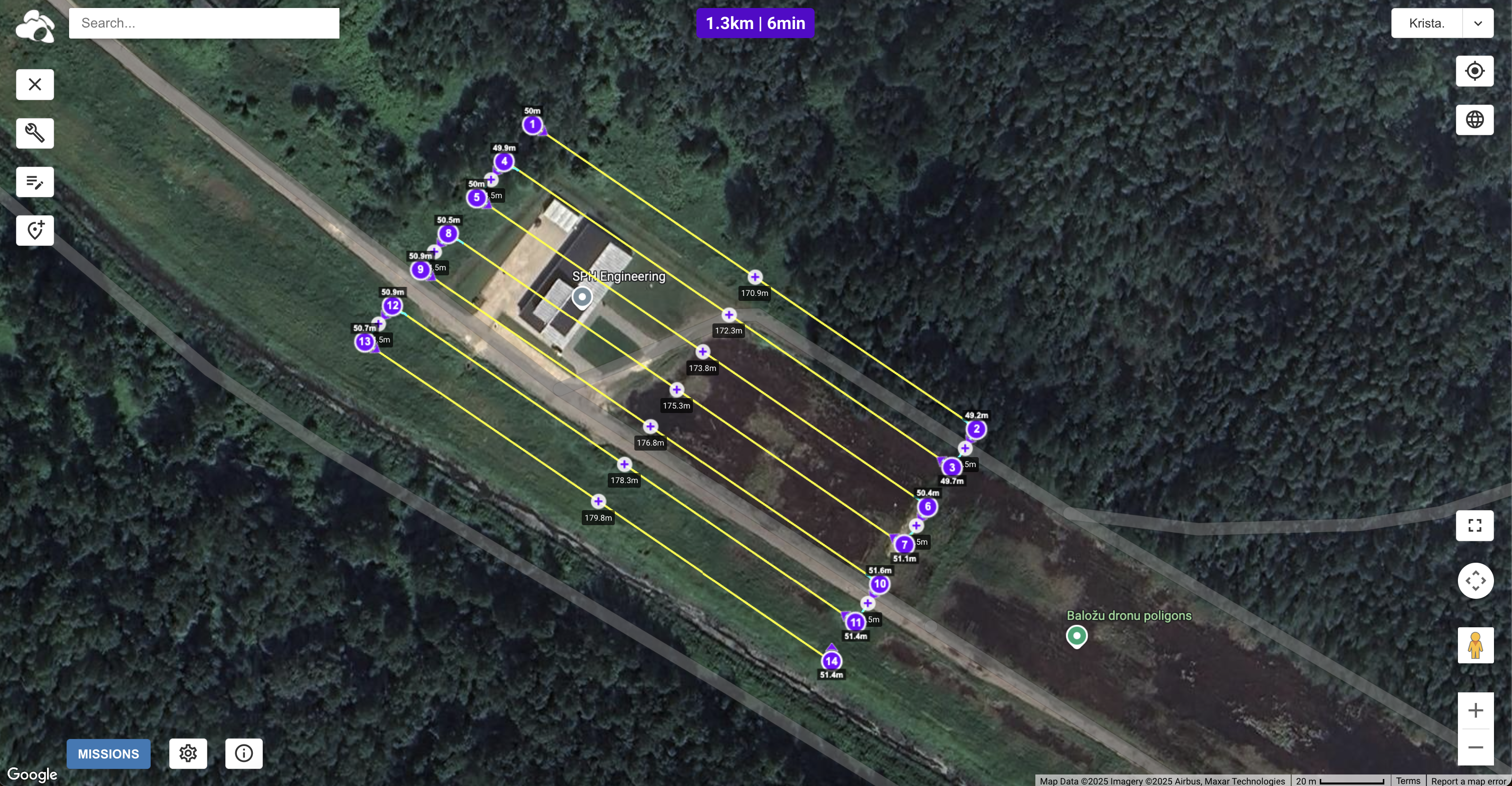
Check and adjust route settings.
-
Check that altitudes and headings are correct.
-
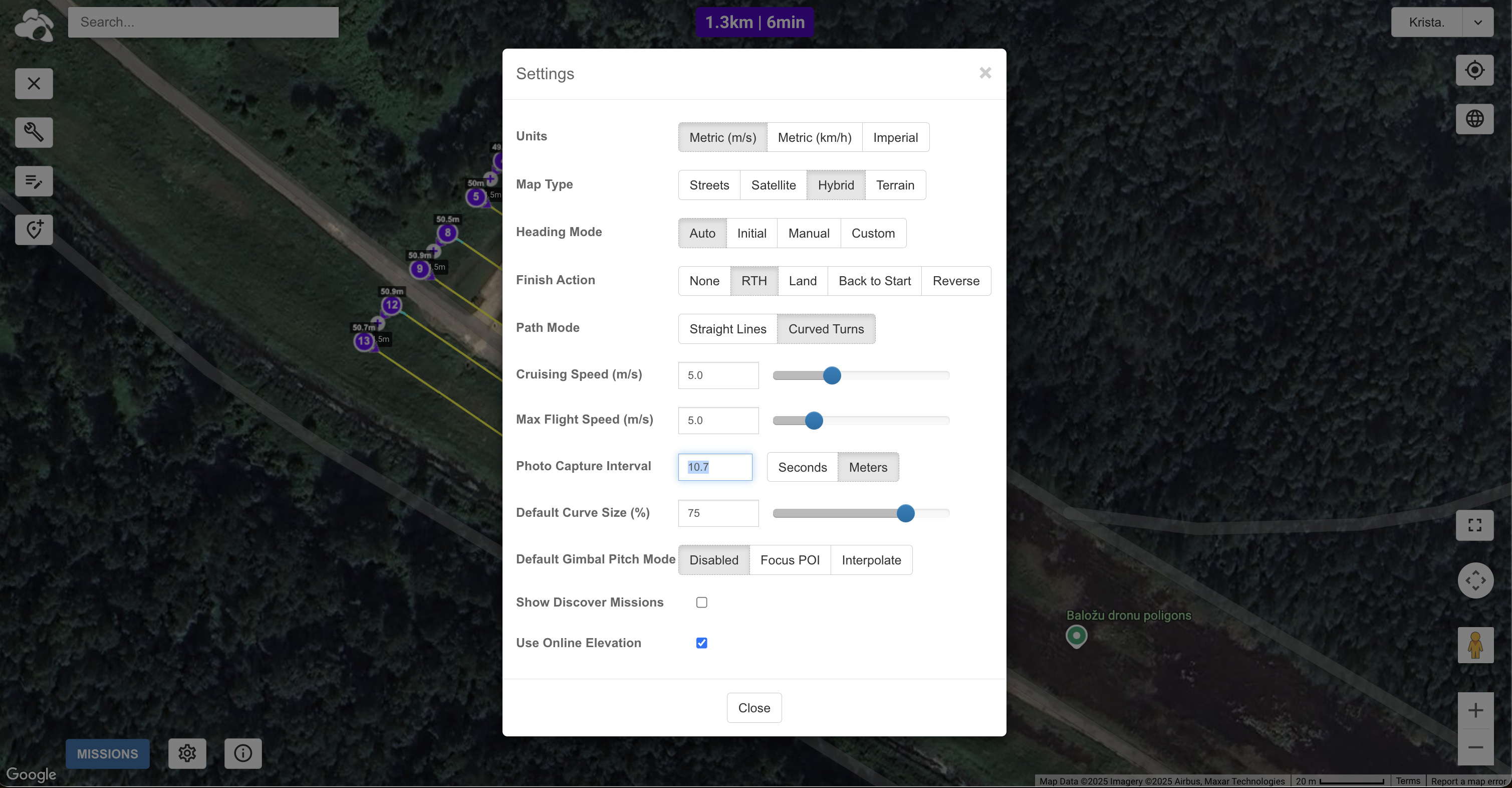
Check route settings and adjust photo capture interval (seconds / meters) to the value shown in UgCS route log (in this example - 10.7 meters).
Route speed should also match the speed in UgCS route to ensure correct overlap between images.
Heading mode should be set to Auto.
Use Online Elevation should be checked.
-
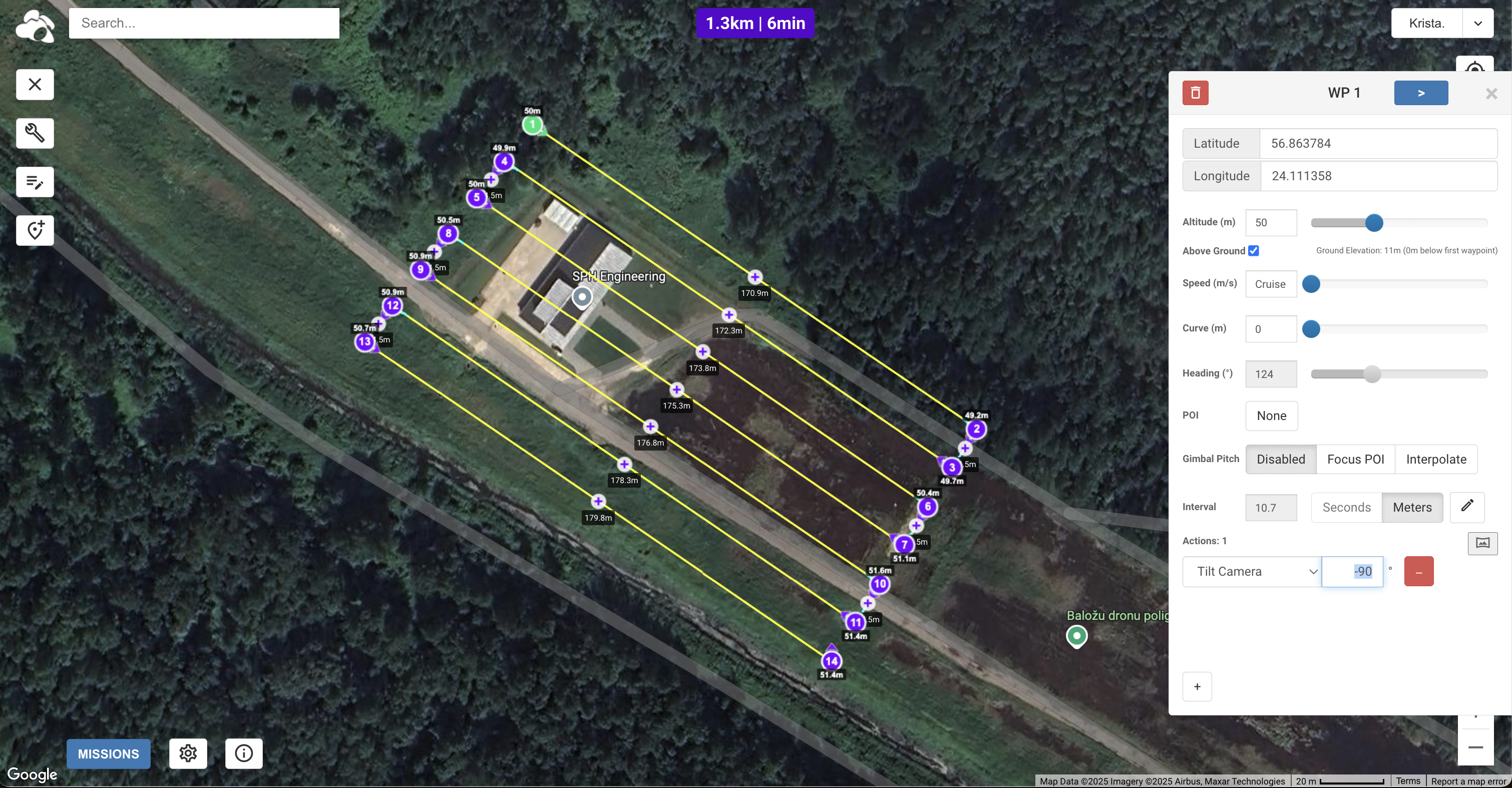
Select the first waypoint and add a Tilt Camera: -90 action.
This step is not mandatory, but will ensure that the drone moves the camera down automatically when starting the route.
-
-
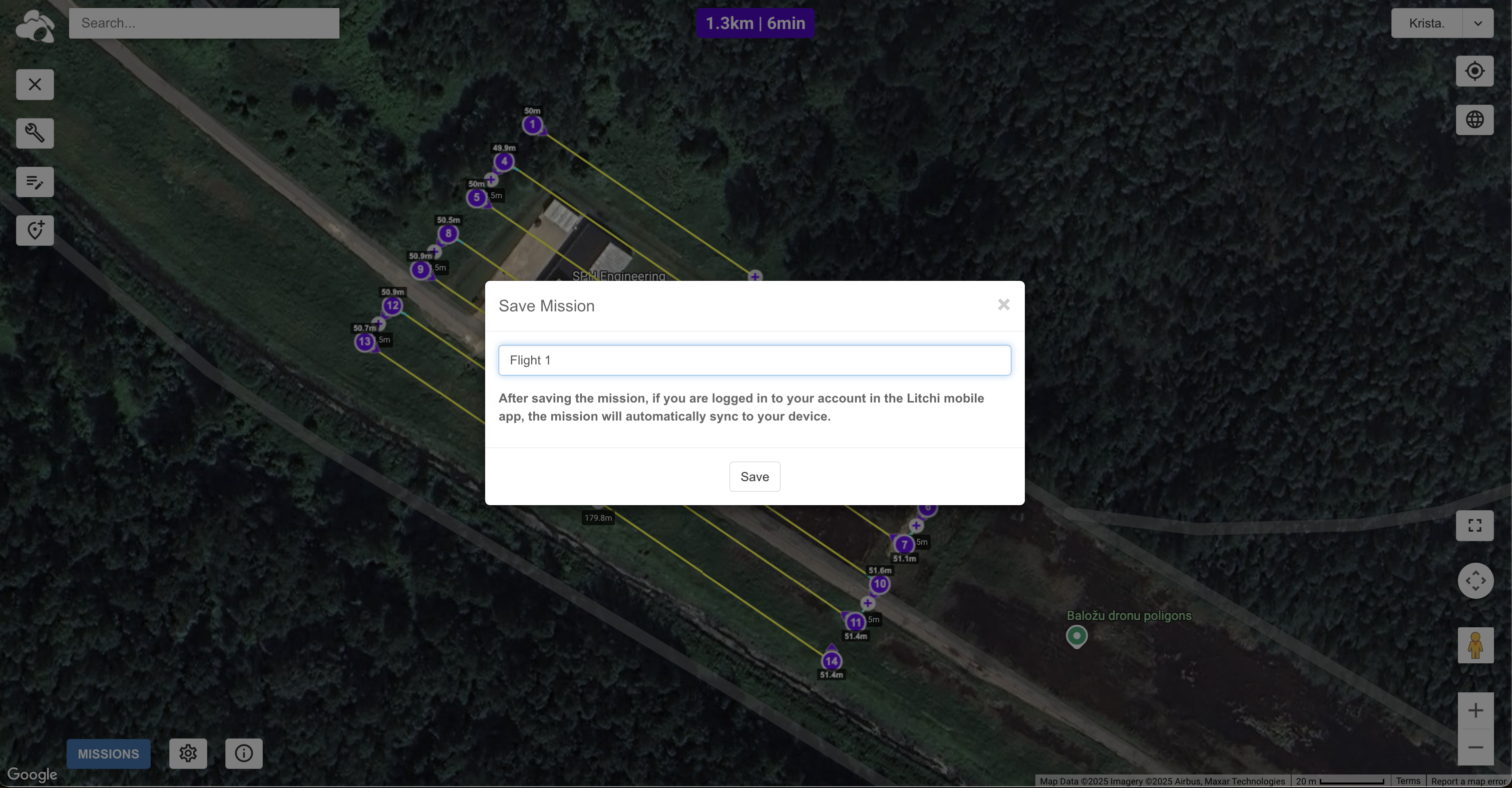
Save the mission.
In Mission Hub click on Missions / Save. In the pop-up window, enter a name for your mission and save it.
After it is saved, it should automatically become available in the Litchi mobile app when logged in.
-
Fly the drone and collect data.
Now you are ready to go into the field and fly your UgCS mission.
One more important recommendation - depending on what drone you have, you might want to set the camera settings to manual to ensure consistency and make map stitching easier.
Updated 9 months ago