Manual Lidar IMU calibration
The main goal of the calibration pattern is to put drones to their maximum ability in terms of roll angle. That means passing the eight-figure at the maximum possible speed, which will make a proper IMU calibration.
It is possible to make manual IMU calibration, which is available for the UgCS EXPERT and ENTERPRISE licenses and supported DJI drones - M600, M300, or M210/M200.
When the drone is connected to UgCS and takes off, the "Pattern" button will be available in the "Commands".

Depending on the Lidar model, two figure types can be chosen.
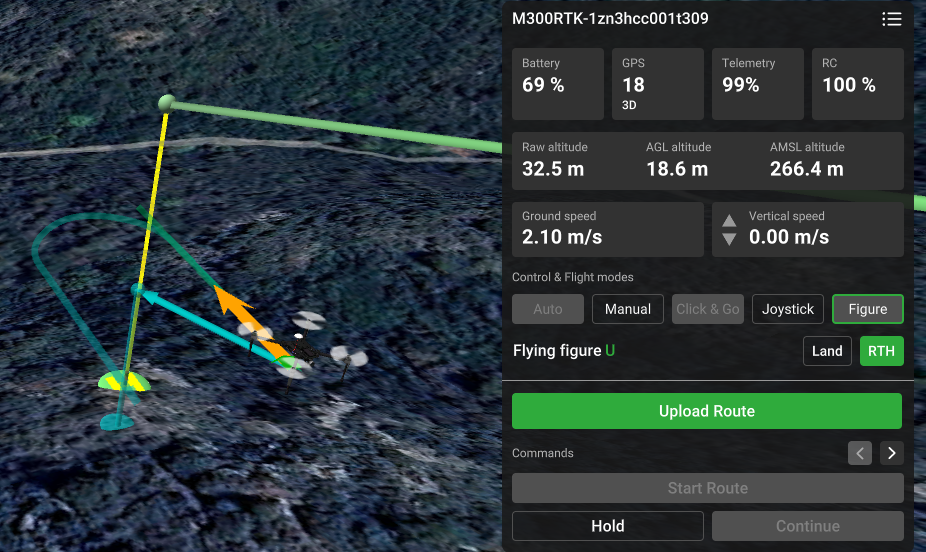
U-figure

Eight figure


Figures parameters
| Parameter | Definition |
|---|---|
| Width, m | Width of the bounding box of the figure. Default: 30 meters |
| Length, m | Length of the bounding box of the figure |
| AGL Altitude, m | Altitude above elevation in the figure center |
| Speed, m/s | The horizontal speed of the drone, m/s |
| Number of cycles | Number of cycles |
Updated 9 months ago
Did this page help you?