GPS receiver for Ardupilot Remote ID configuration
UgCS allows configuring the Remote ID to use operator location that can be received from additional GPS receiver.
How configure UgCS to use GPS receiver
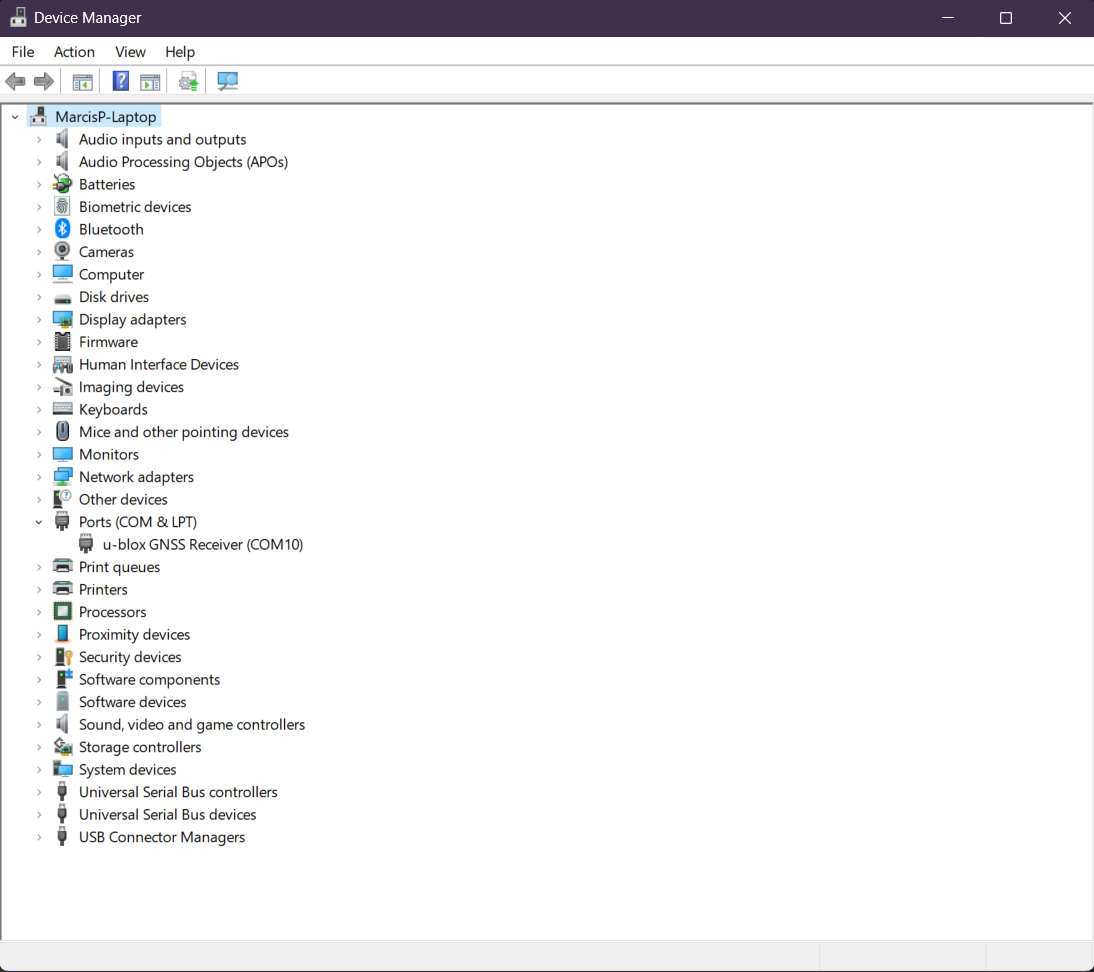
- Connect GPS receiver to PC with installed UgCS. Find device in system settings. (For Windows - Device Manager, for MacOS - terminal system commands)
- Find GPS device.
Windows
Device Manager in Windows when GPS receiver connected to PC
Mac OS
Terminal system command in MacOS that will show available USB connections.
~ $ioreg -p IOUSB
+-o Root <class IORegistryEntry, id 0x100000100, retain 29>
+-o AppleT8103USBXHCI@00000000 <class AppleT8103USBXHCI, id 0x100000457, registered, matched, active, busy 0 (54363 ms), retain 147>
+-o AppleT8103USBXHCI@01000000 <class AppleT8103USBXHCI, id 0x100000380, registered, matched, active, busy 0 (226993 ms), retain 414>
+-o USB 2.0 Hub @01100000 <class IOUSBHostDevice, id 0x1000ab2ca, registered, matched, active, busy 0 (22466 ms), retain 39>
+-o Mass Storage Device@01110000 <class IOUSBHostDevice, id 0x1000ab2db, registered, matched, active, busy 0 (13328 ms), retain 30>
+-o u-blox GNSS receiver@01140000 <class IOUSBHostDevice, id 0x1000b5afb, registered, matched, active, busy 0 (4067 ms), retain 29>Terminal system command in MacOS that will show correct path to GPS receiver.
~ $ls /dev/cu*
/dev/cu.Bluetooth-Incoming-Port /dev/cu.usbmodem11401 /dev/cu.wlan-debug/dev/cu.usbmodem11401 this is correct path to GPS receiver.
- Open
vsm-ardupilot.conffile (Default path Win:C:\Program Files (x86)\UgCS\bin\vsm-ardupilot.conf, MacOS:Library/Application Support/UGCS/vsm-ardupilot.conf). - If required to use GPS location as operator location edit parameter
operator.location.typeand set the value1. - Set parameter
gps.connection.serial_portregarding system information. For WindowsCOMX, whereXis a number from1-256. For MacOS there can be different values, that starts from/dev/cu.*(as example/dev/cu.usbmodem11401). - Set parameter
gps.connection.baud_rateregarding system information. Commonly used baud rate:9600.
How GPS configuration in vsm-ardupilot.conf file will look after all changes:
# Remote ID Operator Location Type
# 0: Use aircraft home location
# 1: Use GPS receiver data
# Default: 0
operator.location.type=0
# GPS Receiver configuration parameters
# Not used, if operator.location.type != 1 (If not used GPS receiver data)
gps.connection.serial_port=COM4
# Common used: 9600
gps.connection.baud_rate=9600How to use built-in GPS receiver
Here is described manual for Windows based tablet MESA 2. The process may differ for other devices.
UgCS support built-in GPS receivers as devices for operator location. (Tested only on Windows based tablets).
- Install latest available drivers for built-in GPS receiver and latest updates for tablet. For Mesa 2 tablet GNSS (GPS) drivers available by this link.
After driver installation open Device Manager.
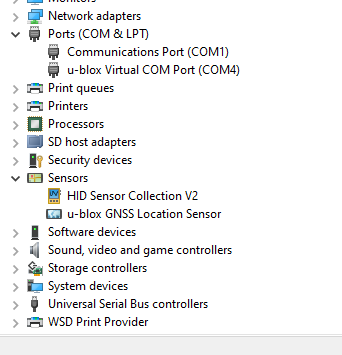
There is u-blox Virtual COM Port (COM4) in Ports section. This device can be used as a source of GPS data for operator location.
- Open
vsm-ardupilot.conffile (Default path Win:C:\Program Files (x86)\UgCS\bin\vsm-ardupilot.conf). - If required to use GPS location as operator location edit parameter
operator.location.typeand set the value1. - Set parameter
gps.connection.serial_portregarding system information. As example for Windows can be usedCOM4. - Set parameter
gps.connection.baud_rateregarding system information. Commonly used baud rate is9600.
Updated 9 months ago