Circlegrammetry area

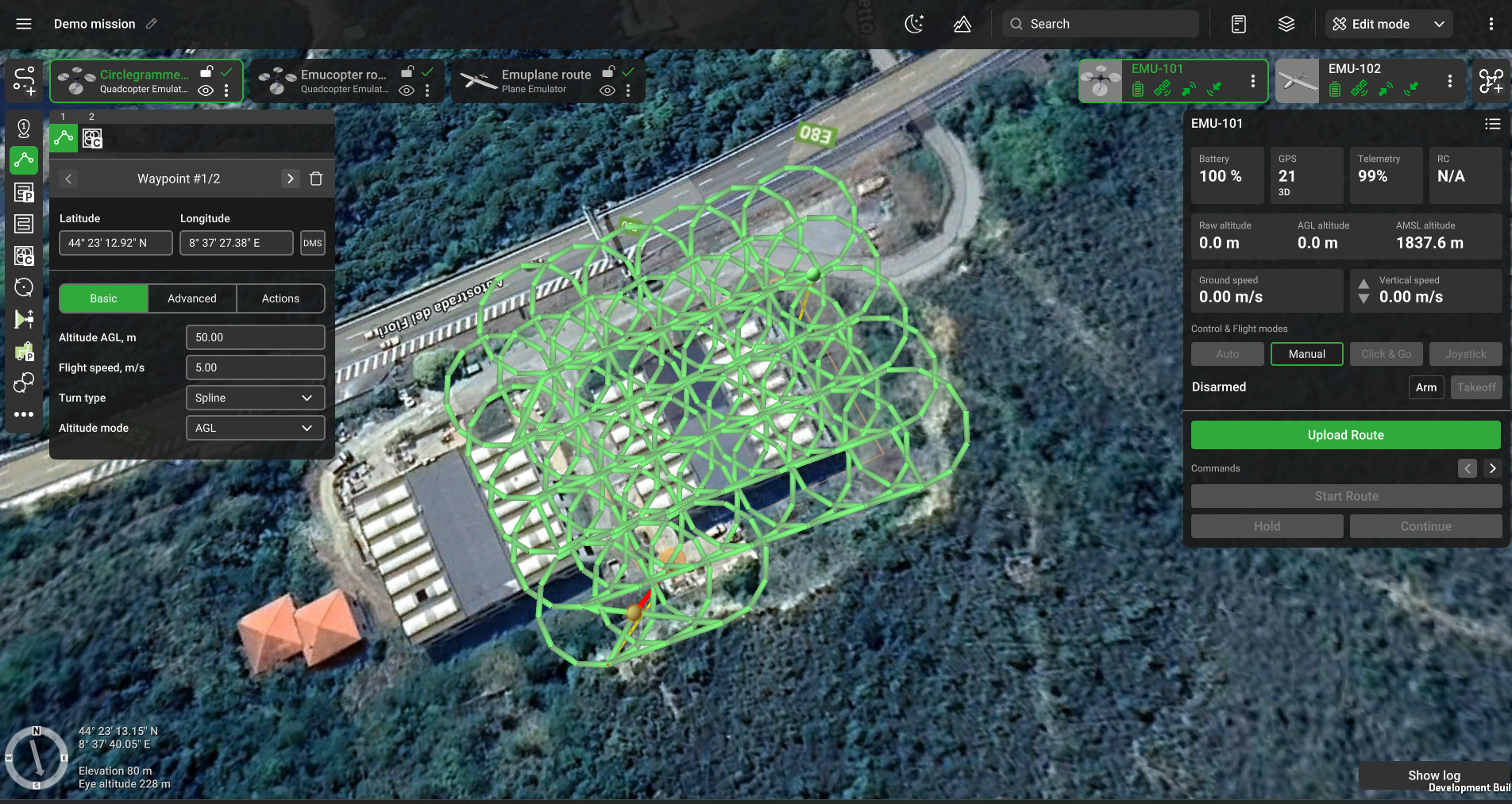
Circlegrammetry area flight plan
The Circlegrammetry tool is an innovative drone flight planning algorithm designed for pilots conducting photogrammetry missions that require oblique imagery. Unlike traditional survey grid or double-grid flight patterns, the Circlegrammetry tool captures images in a circular pattern. In this pattern, the drone flies with its camera facing the center of each circle, tilted at an oblique angle (typically between 45 and 70 degrees).
Benefits of the Circlegrammetry Tool:
- Enhanced Angle Coverage: Captures ground objects from multiple angles, improving the accuracy of the geometry.
- Reduced Flight Time: Requires less flight time compared to a full double-grid survey.
- Efficient Image Collection: Achieves accurate object geometry with fewer images than a double-grid flight pattern.
For Circlegrammetry are available all standard options and additionally, these features:
Basic

Camera – payload assigned to a profile. In the case of multiple cameras assigned to the profile, it is possible to select which camera to use.
Flight height - altitude of flight along the area.
Radius - each circle radius in meters.
Shots per circle - camera shots quantity per circle. By default set Automatically.
Camera angle - camera angle to capture a shot.
Circle overlap - the ratio of the overlap in the neighboring frame.
Advanced

AGL Tolerance,m – allows flying straight trajectories over the slightly waved landscape, by specifying how precisely the UAV should follow the required altitude above ground. To maintain a specified height additional waypoints will be added if the height difference is larger than the AGL tolerance. The smaller the AGL tolerance value, the greater the number of waypoints will be generated. If AGL tolerance is set to 0 (zero) UAV’s altitude will be constant throughout the route, but many additional waypoints will be added.
Direction angle - used to change the direction of the main scanning progress. By default, the algorithm calculates a route scan in a bounded polygon so that the main course of the scan performs in the direction of "South-North".
Actions
This section does not allow user-managed actions
Updated 9 months ago