Creeping line

Creeping line flight plan
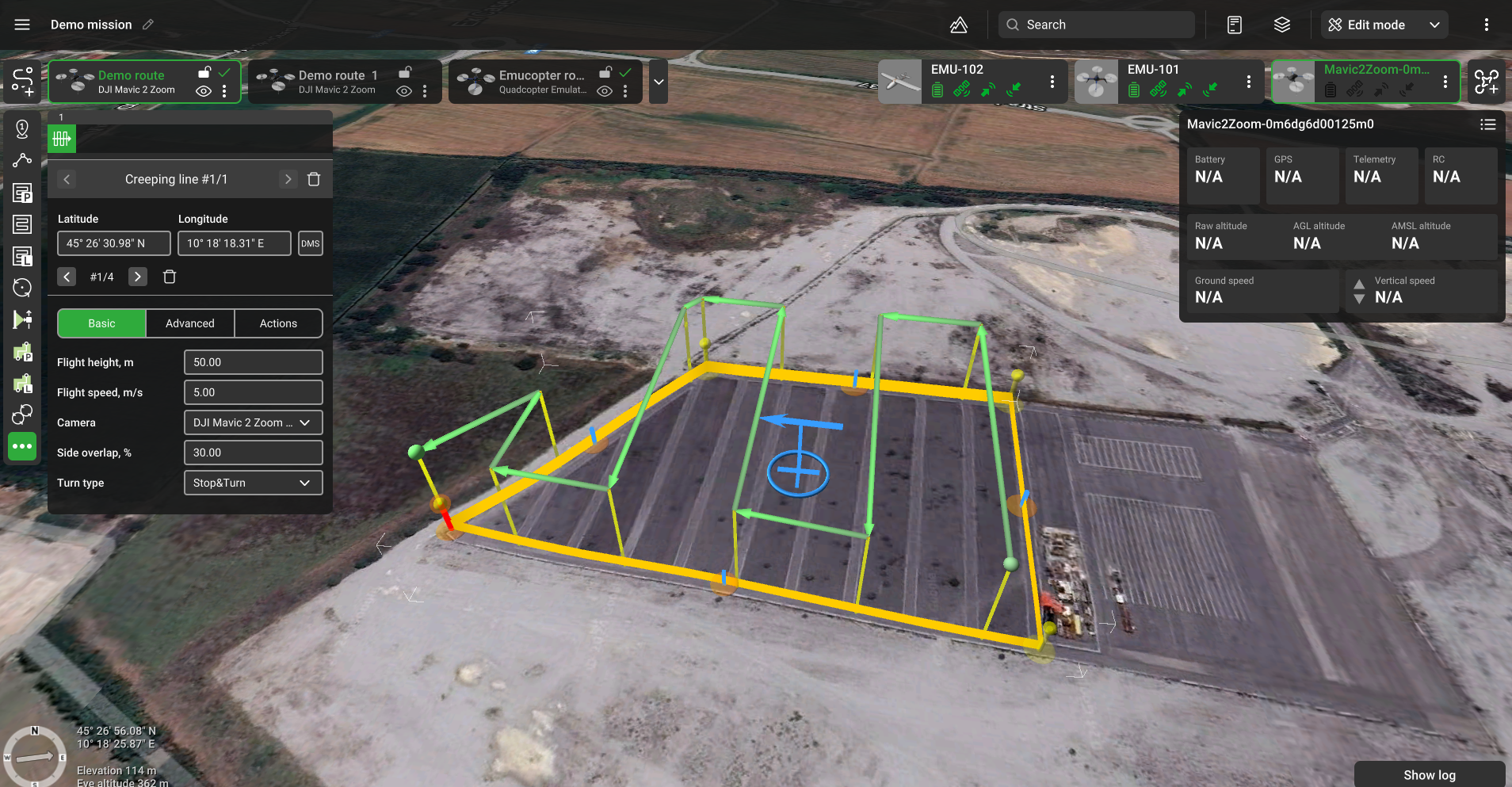
The search pattern tool allows the creation of a specific flight route over an area for search and rescue operations. Once the search and rescue area is marked and the camera’s profile and flight height (AGL) defined, a meander-like flight trajectory covering the whole search area is automatically created without gaps in the camera's footprint.
Search spacing is calculated according to the horizontal FOV of the selected camera’s profile and set flight height (see Camera’s parameters).
All transversal flight segments are parallel, all side segments are located on a convex perimeter of the area's shape (concave shape perimeter is not supported).

Basic

Flight height – altitude of flight along the area.
Camera – a payload assigned to a vehicle profile. If multiple cameras are assigned to the vehicle, it is possible to select which camera will be used to scan the area.
Camera’s parameters - search spacing is derived based on the parameters of the selected camera profile:
d - sensor width
f - focal length
fov = 2 arctan(d / (2 f))
and thus:
tan(fov / 2) = d / (2 f) (eq. 1)
spacing = (2 height) tan(fov / 2)
using:
spacing= (2 height) (d / (2 f))
The final equation for spacing is:
spacing= (height * d) / f
where height - AGL altitude (parameter), d - sensor width (camera profile), f - sensor focal length (camera profile).

Side overlap (%) – the ratio of the overlap into neighboring frames (located in neighboring rows). Value is set in the range from 1% to 90%.
Advanced

AGL Tolerance, m – allows flying straight trajectories over the slightly waved landscape, by specifying how precisely the UAV should follow the required altitude above ground. To maintain a defined height additional waypoints will be added if the height difference is larger than the AGL tolerance. The smaller the AGL tolerance value, the greater the number of waypoints will be generated. If AGL tolerance is set to 0 (zero) UAV’s altitude will be constant throughout the route, but a lot of additional waypoints will be added.
Direction angle - to change the direction of the main scanning progress. By default, the algorithm calculates a route in a bounded polygon so that the main course of the scan is performed in the direction of "South-North".
No action at last point – will remove the action of the last waypoint.
Updated 9 months ago