Vertical scan

Vertical scan flight plan
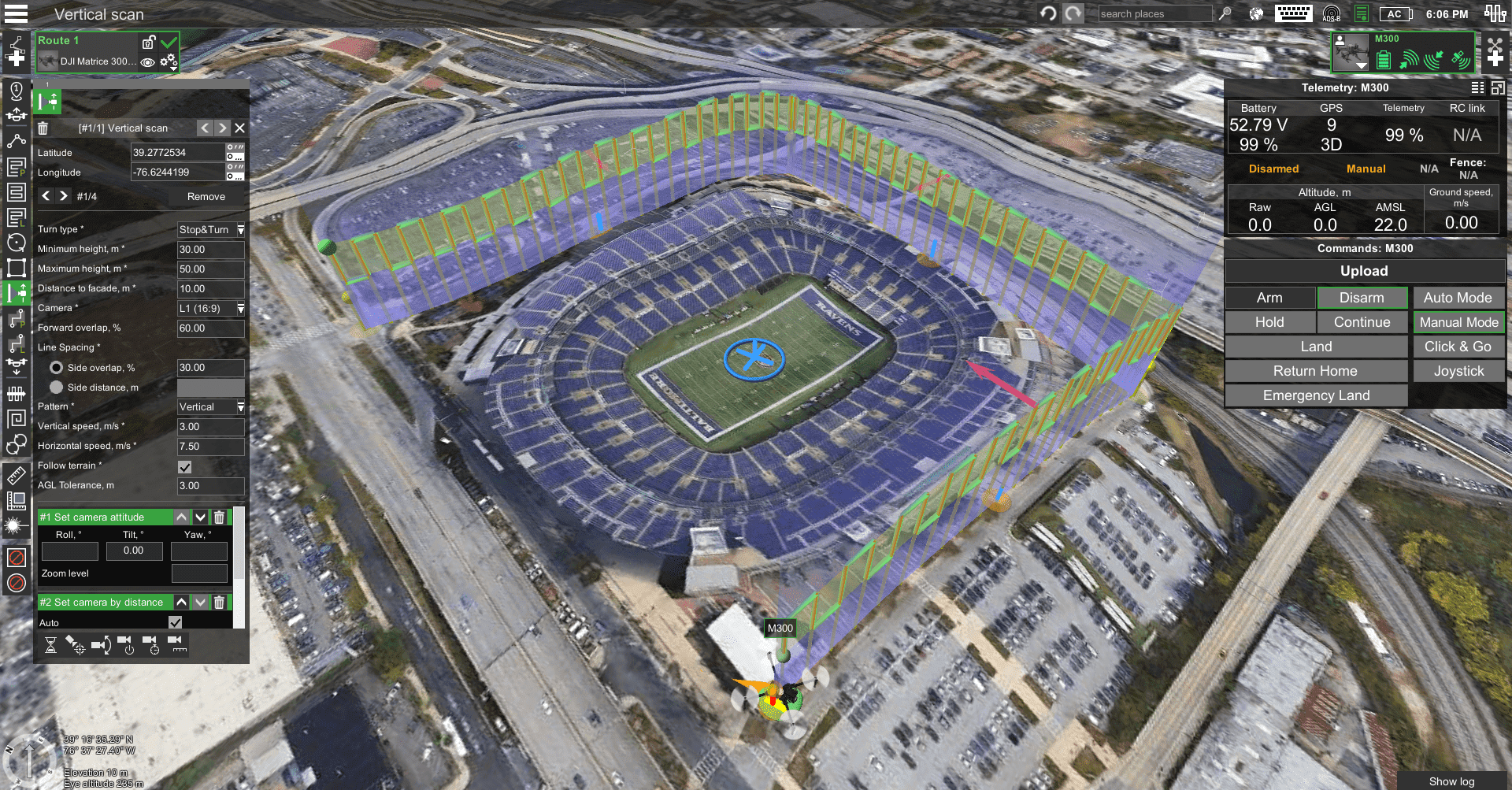
The vertical scan creates a flight route to scan vertical objects. The calculation of the route is similar to Photogrammetry's tool only for vertical objects. It is implied, that the scanning zone is always rectangular, limited by vertical lines passing through A and B and horizontal lines on the minimum and maximum height.

| Parameter | Control | Description |
|---|---|---|
| Turn type | The input field allows to change of drone turn type |
|
| Minimum height (AGL) | Input field allowing to specify a minimum height | Specifies minimum height above ground relief AGL only irrespective to route settings Parameter is mandatory Must be in a range of allowed altitude for the vehicle profile: between «Safe height over terrain» and «Max altitude, AGL» Must not be greater than «Maximum height (AGL)» |
| Maximum height (AGL) | Input field allowing to specify the maximum height | Specifies maximum height above ground relief AGL is only irrespective to route settings. Parameter is mandatory Must be in a range of allowed altitude for the vehicle profile: between «Safe height over terrain» and «Max altitude, AGL» Must not be less than «Minimum height (AGL)» |
| Distance to facade | Input field allowing to specify the distance to the facade | Specifies drone distance to the facade |
| Camera | Drop-down list containing cameras attached to the vehicle profile | Parameter is mandatory |
| Line Spacing: Side overlap (%) | Input field allowing to specify overlap in percentage | Specifies overlap percentage between subsequent shots on a single forward pass Default 50% Parameter is mandatory Must not exceed 90% |
| Line Spacing: Side distance (m) | Input field allowing to specify side distance in meters | Specifies side distance meters |
| Pattern | Dropdown with two values: • Horizontal • Vertical | Specifies scan pattern type Default is vertical Parameter is mandatory |
| Vertical speed | Input field allowing to specify the vertical speed | Specifies the required vertical speed Default maximum vertical speed from profile Parameter is mandatory Must not exceed maximum allowed vertical speed from profile |
| Horizontal speed | Input field allowing to specify the horizontal speed | Specifies required horizontal speed Default maximum horizontal speed from profile divided by 2 Parameter is mandatory Must not exceed maximum allowed horizontal speed from profile |
| Follow terrain | Checkbox | Allows the UAV to automatically adjust altitude during flights based on current elevation |
| AGL Tolerance | Input field allowing to specify how precisely the UAV should follow the required altitude above ground | To maintain a specified height additional waypoints will be added if the difference in height is larger than the AGL tolerance. The smaller the AGL tolerance value, the more amount of waypoints will be generated. If AGL tolerance is set to 0 (zero) UAV’s altitude will be constant throughout the route, but many additional waypoints will be added. |
A vertical scan scanning zone is always a vertical rectangle with vertical (default) or horizontal flight pattern.
• During the flight, the vehicle will always face a facade;
• Turn type is Stop & turn
• «Camera by time» automatic triggering is calculated based on the distance to the façade, camera FOV, and vehicle speed (depending on the selected pattern vertical or horizontal)
After the route is calculated successfully, the message will show:
- Vertical scan area, resulting GSD, step between forwarding passes
- Calculated the number of camera shots and the interval between shots
Scanning will start from the corner of the rectangle, which is closest to the first waypoint, or if no waypoint is set before the Vertical scan - from the left bottom corner.
Vertical scan-supported actions:
• Camera control
• Camera trigger
• Camera by time
• Wait.